Added resistance in waves: “Pinkster” solver versus “Keuning 2006” comparison

In 1980, Johannes Albert Pinkster defended his doctoral thesis “Low frequency second order wave exciting forces on floating structures”. His work focused on how these forces acted on stationary vessels in regular and irregular waves and developed a method to predict them. His method can also be used to predict the additional resistance in waves experienced by a ship by adjusting the frequency of encounter of the waves.
Twenty-six years later, in 2006, Jan Alexander Keuning et al. presented the paper “An Approximation Method for the Added Resistance in Waves of a Sailing Yacht,” which aimed to develop a calculation method for the assessment of the added resistance of a sailing yacht when sailing in waves. Their approach uses a polynomial expression that considers the primary design parameters of interest as far as added resistance in waves is concerned.
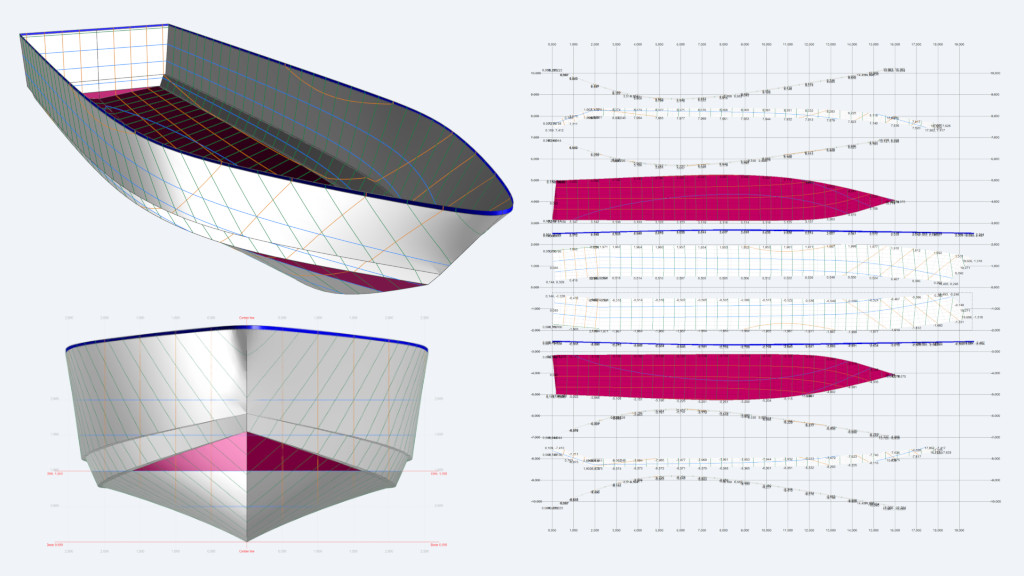
This article compares these both methods developed at TU Delft by applying them to a day-boat project and analyzing the results.